Detektion und Klassifikation von Verkehrsteilnehmer
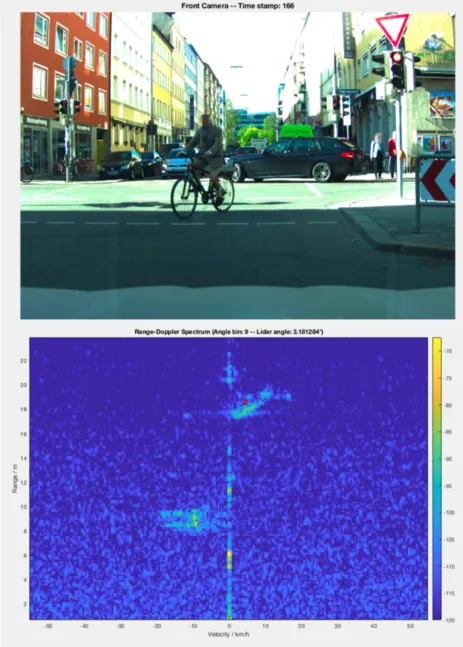
Die zunehmende Automatisierung der Fahrfunktionen im Automobil bringt hohe Ansprüche an die Sensorik. Besonders in Innenstadtszenarien, wo sich Fußgänger, Fahrradfahrer und PKWs die Straßen teilen, ist eine robuste und genaue Erfassung des Fahrumfeldes von höchster Priorität. Klassische Radarsignalverarbeitungsansätze basieren meist auf sogenannten Punktzielen im Radarspektrum. Jedoch ist diese Annahme für Ziele in der nahen Umgebung eines automobilen Radars nicht mehr gültig. In diesem Bereich weisen die Ziele ausgedehnte Geschwindigkeits- und Entfernungsprofile auf (siehe Abb. 1).
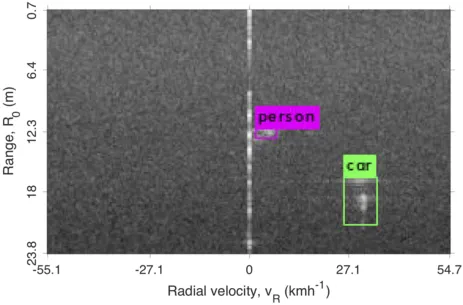
Da unterschiedliche Verkehrsteilnehmer unterschiedliche Muster im Range-Doppler Spektrum erzeugen, bietet Deep Learning eine Möglichkeit, diese zu klassifizieren. Methoden aus der Computer Vision (beispielsweise YOLO) werden umgesetzt, um die Radarsignaturen gefährdeter Verkehrsteilnehmer (Fußgänger und Fahrradfahrer) zu detektieren und klassifizieren (siehe Abb. 2). Die Messdaten für das Trainieren und Testen der Algorithmen werden mit unserem Versuchsträger eingefahren.